মেকানিক্যাল পাওয়ার
ট্রান্সমিশান সিস্টেম কি?
যে কোন ধরনের মেকাট্রনিক্স সিস্টেমেই মেকানিক্যাল
পাওয়ার ট্রান্সমিশন সিস্টেম একটি খুবই গুরুত্বপূর্ণ বিষয়।মেকানিক্যাল পাওয়ার ট্রান্সমিশন বলতে বোঝায় অ্যাকচুয়েটারের বিভিন্ন ধরনের
মুভমেন্টকে কাজে লাগিয়ে নানা প্রকারের মেকানিক্যাল কাজ সম্পন্ন করার জন্য
প্রয়োজনীয় ব্যাবস্থা। যেমন উদাহরণস্বরূপ কোন মেশিনের ক্ষেত্রে অ্যাক্সিসকে চালানোর জন্য ড্রাইভ
মোটর এবং তার সংযোগকারী ব্যাবস্থা অথবা স্বয়ংক্রিয় রোবটিক সিস্টেমের ক্ষেত্রে বিভিন্ন
ডাইরেকশানে আর্ম মুভমেন্ট
ব্যাবস্থা ইত্যাদি। যে কোন জটিল
মেকাট্রনিক্স সিস্টেমেই বিভিন্ন ধরনের মেকানিক্যাল পাওয়ার ট্রান্সমিশন সিস্টেম
দেখতে পাওয়া যায়, এর মধ্যে কয়েকটি রোটারি
অ্যাকচুয়েটারের মোশানকে লিনিয়ার মুভমেন্টে পরিবর্তন করে থাকে যেমন লিড-স্ক্রু সিস্টেম, বলস্ক্রু-নাট সিস্টেম ইত্যাদি, তেমনই কিছু আবার টর্ক ট্রান্সমিশন করার জন্য ব্যাবহৃত হয় যেমন গীয়ার
বক্স, টাইমিং বেল্ট, কাপলিং ইত্যাদি। এছাড়া রোটারি মোশানকে এক প্লেন থেকে অপর প্লেনে
ট্রান্সমিট করার জন্য ওয়ার্ম এবং ওয়ার্ম হুইলের ব্যাবহার দেখা যায় এবং বিভিন্ন
ধরনের ইন্ডেক্স মেকানিজমের সাহায্যেও মেশিনের মেকানিক্যাল পাওয়ার ট্রান্সমিশান করা হয়ে থাকে। এই অধ্যায়ে মেকাট্রনিক্স
সিস্টেমে ব্যাবহৃত কিছু কমন এবং সরল মেকানিক্যাল পাওয়ার
ট্রান্সমিশন সম্পর্কে আলোচনা করা হল।
১। লিড-স্ক্রু
লিড-স্ক্রু এ, একটি 'নাট' একটি ঘূর্ণায়মান 'থ্রেডেড রড বা স্ক্রু'-এর উপর দিয়ে লোড স্থানান্তরিত করে (মেশিনের ক্ষেত্রে অ্যাক্সিস সরানোর জন্য)। লিড-স্ক্রু নাট এবং স্ক্রু মধ্যে সরাসরি স্লাইডিং হওয়ার জন্য, এখানে ঘর্ষণ বেশী হয় এবং এটি কম এফিসিয়েন্ট, কিন্তু লিড-স্ক্রু ব্যবহার করার বড় সুবিধা হল, এটি প্রচুর লোড বহন করতে সক্ষম এবং কম ব্যয়বহুল। CNC মেশিনে লিড-স্ক্রু এর ব্যবহার খুবই সীমিত এবং শুধুমাত্র আগেকার সস্তা CNC মেশিনেই এগুলির ব্যাবহার দেখতে পাওয়া যায়। পরবর্তীতে লিড-স্ক্রু একটি ছবি দেওয়া হল।

২। রিসার্কুলেটিং বল স্ক্রু
এটি আরেকটি মেকানিক্যাল পাওয়ার ট্রান্সমিশন সিস্টেম, যেখানে রোটারি মোশান সঠিকভাবে লিনিয়ার মোশানে রূপান্তরিত করা হয়েছে। CNC মেশিনের মতো উন্নত মেকাট্রনিক্স সিস্টেম এক্সিস মুভেমেন্টের জন্য সর্বদা রিসার্কুলেটিং বল স্ক্রু এবং নাট সিস্টেমই ব্যবহার করে থাকে। বল-স্ক্রুকে এখানে সার্ভো মোটর দ্বারা ঘোরানো হয়, এবং বল-স্ক্রু নাট সিস্টেমের সাথে যুক্ত মেশিনের বেডে লিনিয়ার মোশান পাওয়া যায়। স্ক্রু এবং নাটের মধ্যে স্লাইডিং ফ্রিকশান এখানে কিছু বলের রোলিং মুভমেন্টের দ্বারা প্রায় নির্মূল করা হয় এবং ফলস্বরূপ এক্সিস মুভমেন্টে মসৃণতা বাড়ায় এবং কম ফ্রিকশান হয়। এই ধরেনের সিস্টেমে একটি লিড-স্ক্রু সিস্টেমের তুলনায় বেশী লোড অতিক্রম করার জন্য একটি কম ক্ষমতার মোটরের প্রয়োজন হয়। নিচের ছবিতে একটি বল-স্ক্রু এবং নাট সিস্টেম দেখানো হল।

উপরে একটি বল স্ক্রু এর ছবি দেখানো
হয়েছে, এখানে বলগুলি স্ক্রু এবং একটি নাটের মধ্যে
ঘোরে এবং একটি বিন্দু পর্যন্ত যাওয়ার পরে, বলগুলি আবার রিটার্ন পথ দিয়ে থ্রেডেড নাটের প্রবেশ পথে ফিরে
আসে। বল চলাচলের উপর নির্ভর করে দুই ধরনের রিসার্কুলেটিং ব্যবস্থা রয়েছে; সেগুলি হল 'রিসার্কুলেটিং থ্রু ইনসার্ট চ্যানেল' এবং 'রিসার্কুলেশান ভায়া এক্সটার্নাল টিউব'। নিচে এই দুই ধরনের রিসার্কুলেটিং বল স্ক্রু সিস্টেম দেখানো হয়েছে।

বেশিরভাগ সিএনসি মেশিনের অ্যাক্সিস চলাচলের জন্য রিসার্কুলেটিং বল স্ক্রু ব্যবহার করা হয়ে থাকে। এখানে বল এবং বিয়ারিং এর ঘূর্ণায়মান মুভমেন্টের সাহায্যে স্ক্রু এবং নাটের মধ্যেকার
স্লাইডিং ঘর্ষণ দূর করা হয়। এই ক্ষেত্রে, স্ক্রুটির প্রোফাইল গোলাকার হয়ে থাকে এবং সাধারণত দুই ধরনের
গোলাকার থ্রেডেড বল স্ক্রু CNC মেশিনে দেখতে পাওয়া যায়। এগুলি হল 'সার্কুলার আর্ক টাইপ' এবং 'গথিক আর্ক টাইপ'। নিচের ছবিতে, দুই ধরনের বল স্ক্রু থ্রেড দেখানো হয়েছে।

লিড-স্ক্রু এবং
বল-স্ক্রুর মধ্যে পার্থক্য - একটি বল স্ক্রু এবং একটি লিড-স্ক্রুর মধ্যে মূল
পার্থক্য হল মুভিং সারফেসের ওপর লোড বহন করার পদ্ধতি। একটি বল-স্ক্রু ঘর্ষণ কমাতে
এবং দক্ষতা বাড়াতে রিসার্কুলেটিং বল স্ক্রু এবং বিয়ারিং ব্যবহার করে, এবং একটি লিড-স্ক্রুর লোড বহন ক্ষমতা স্লাইডিং পৃষ্ঠের
মধ্যেকার কোএফিসিয়েন্ট অফ ফ্রিকশানের উপর নির্ভর করে। একটি লিড-স্ক্রু তাই সাধারণত
একটি বল স্ক্রুর দক্ষতা অর্জন করতে পারে না। লিড-স্ক্রুগুলি ডিপ হেলিকাল থ্রেড এবং
একটি ‘মেটিং নাট’ ব্যবহার করে, যা সাধারণত একটি পলিমার কম্পোজিট বা ব্রোঞ্জ দিয়ে তৈরি হয়। একটি বল
স্ক্রুতে স্ক্রু এবং নাটের মধ্যে ম্যাচিং হেলিকাল খাঁজ রয়েছে যা বল বিয়ারিংগুলিকে সেই
রেসে রিসার্কুলেটিং করতে দেয় এবং সেগুলি
সাধারণত গোলাকার বল বিয়ারিং এর মাপ অনুসারে আকৃতিতে অর্ধবৃত্তাকার হয়। নিচে
লিড-স্ক্রু এবং বল-স্ক্রু এর গঠনশৈলীর মধ্যে পার্থক্য দেখানো হল।

৩। রোলার স্ক্রু
রোলার স্ক্রুর সাহায্যেও রোটারি অ্যাকচুয়েটারের মুভমেন্টকে লিনিয়ার মুভমেন্টে পরিবর্তিত করা হয়।রোলার স্ক্রু এর সাহায্যে বল স্ক্রু এর তুলনায় অনেক বেশী সুবিধা পাওয়া যায়। রোলার স্ক্রুএর লোড নেওয়ার ক্ষমতা, লিনিয়ার স্পীড, সহনক্ষমতা, অ্যাকুইরেসি ইত্যাদি বল স্ক্রু এর তুলনায় অনেক বেশী হয়। মেকাট্রনিক্স সিস্টেমে প্রধানত দুই ধরনের রোলার স্ক্রু ব্যাবহার করা হয়, এগুলি হল প্ল্যানেটরি এবং রি-সার্কুলেটিং রোলার স্ক্রু। এই দুই ধরনের রোলার স্ক্রুর সাহায্যেই যে কোন মেশিনের অ্যাক্সিসে backlash-free মুভমেন্ট পাওয়া যায়, এবং ফলস্বরূপ রোলার স্ক্রুতে বল স্ক্রু এর তুলনায় অনেক বেশী এফিসিয়েন্সি পাওয়া যায়। দুই ধরনের রোলার স্ক্রুর মধ্যে মূল পার্থক্য হল প্ল্যানেটরি রোলার স্ক্রুর ক্ষেত্রে রোলারগুলি থ্রেডেড করা থাকে কিন্তু রি-সার্কুলেটিং রোলার স্ক্রুর ক্ষেত্রে রোলারগুলি থ্রেডেড করার পরিবর্তে সার্কুলার গ্রুভ করা থাকে। পরের পাতায় একটি রোলার স্ক্রুর ছবি দেওয়া হল।

৪। র্যাক অ্যান্ড পিনিয়ন মেকানিজম
র্যাক অ্যান্ড পিনিয়ন মেকানিজম সাধারনত রোটারি মোশানকে লিনিয়ার মোশানে পরিবর্তন করে থাকে।তবে কিছু ক্ষেত্রে ইন্ডেক্সিং মেকানিজম হিসাবেও এটির ব্যাবহার দেখা যায় এবং সেক্ষেত্রে র্যাক অ্যান্ড পিনিয়ন মেকানিজমকে রিভার্স মোশানে ব্যাবহার করা হয়। অর্থাৎ সেক্ষেত্রে লিনিয়ার অ্যাকচুয়েটারের সাহায্যে র্যাক গিয়ারে লিনিয়ার মোশান দেওয়া হয় এবং পিনিয়ন গিয়ার থেকে রোটারি মোশান পাওয়া যায়। তবে এক্ষেত্রে রোটারি মোশানকে লিনিয়ার মোশানে পরিবর্তন করার জন্য পিনিয়ন গিয়ারকে মোটরের সাহায্যে ঘোরানো হয় এবং র্যাক গিয়ারে লিনিয়ার মুভমেন্ট পাওয়া যায়। আবার ইন্ডেক্সিং মেকানিজমের ক্ষেত্রে র্যাক গিয়ারকে মুভমেন্ট করানো হয়, হাইড্রোলিক বা নিউম্যাটিক সিলিন্ডারের পিস্টনের সাহায্যে এবং সেক্ষেত্রে পিনিয়ন গিয়ারে ইন্ডেক্সিং মুভমেন্ট পাওয়া যায়। নিচে একটি সরল র্যাক অ্যান্ড পিনিয়ন সিস্টেমের ছবি দেওয়া হল।

৫। গীয়ার বক্স
মেকাট্রনিক্স সিস্টেমে প্রয়োজন অনুযায়ী কখনও কখনও গীয়ার বক্সের ব্যাবহার দেখা যায় এবং এটি টর্ক ট্রান্সমিটিং এলিমেন্ট হিসাবে কাজ করে থাকে। গীয়ার বক্সের সাহায্যে সাধারনত মোটরের হাই স্পীডকে কমিয়ে ফীড ড্রাইভের প্রয়োজনীয় স্পীডে নিয়ে আসা হয় এবং সাথে সাথে মোটরের শ্যাফটের ওপর লোড ইনারশিয়া রিফ্লেকশানও (load inertia reflection) কম করা হয়। মেকাট্রনিক্স সিস্টেমে গীয়ার বক্স সেই সব জায়গাতেই বেশী ব্যাবহার করা হয় যেখানে স্পীড কম করার জন্য মোটরের শ্যাফট এবং আউটপুট শ্যাফট একই লাইনে বা সমান্তরাল (co-axial or parallel) থাকে না। গিয়ারবক্সের ভিতরে একটি গিয়ার ট্রেন তৈরি করতে এবং প্রয়োজনীয় আউটপুট পেতে বিভিন্ন আকারের গিয়ারগুলি একটি নির্দিষ্ট ব্যবস্থায় একত্রিত করা হয়। ড্রাইভার শ্যাফটকে সাধারনত একটি ইন্ডাকশন মোটর দ্বারা ঘোরানো হয় এবং আউটপুট শ্যাফ্ট থেকে কাঙ্ক্ষিত RPM পাওয়া যায়। স্লাইডিং মেশ, কনস্ট্যান্ট-মেশ, সিঙ্ক্রোমেশ এবং এপিসাইক্লিক হল আধুনিক যন্ত্রপাতিতে ব্যবহৃত কিছু বিশেষ ধরণের গিয়ারবক্স। নিচের ছবিতে একটি সাধারণ স্লাইডিং মেশ-টাইপ গিয়ারবক্সের ভিতরের ছবি দেখানো হয়েছে।

৬। বেল্ট এবং পুলি মেকানিজম
বেল্ট এবং পুলি হল সবচেয়ে বেশি ব্যবহৃত মেকানিজম, যা বিভিন্ন মেকাট্রনিক্স সিস্টেমের পাশাপাশি এলিভেটর, ক্রেন ইত্যাদির সাথে নিযুক্ত করা হয়। বেল্ট এবং পুলিগুলি সাধারনত দীর্ঘ দূরত্বে পাওয়ার ট্রান্সমিট করতে ব্যবহৃত হয়। সাধারণত, দুটি পুলি এবং একটি বেল্ট একটি সাধারণ বেল্ট এবং পুলি মেকানিজম তৈরি করতে ব্যবহৃত হত, যেখানে একটি বেল্টের সাহায্যে দুটি পুলির মধ্যে সংযোগ থাকে। একটি পুলিকে ড্রাইভিং পুলি বলা হয় এবং বেল্টের মাধ্যমে ড্রিভেন পুলিতে শক্তি প্রেরণ করা হয়। মেকাট্রনিক্স সিস্টেমের সাথে দুই ধরণের বেল্ট এবং পুলি মেকানিজম কাজ করে থাকে।
ভি-বেল্ট এবং পুলি - দুটি সমান্তরাল অ্যক্সিসের মধ্যে পাওয়ার ট্রান্সমিটের জন্য
ভি-বেল্ট এবং পুলি ব্যবহার করা হয়। একটি V-বেল্ট, যখন ক্রস-সেকশনে দেখা হয়, তখন এটি একটি V আকৃতির মত দেখায় এবং এটি সাধারণত অটোমোবাইল এবং কনভেয়িং সিস্টেমে ব্যবহৃত
হয় এবং কখনও কখনও এটি মেকাট্রনিক্স সিস্টেমের সাথেও কাজ করে। হাই-পাওয়ার
ট্রান্সমিশনের জন্য, দুটি বা ততোধিক V-বেল্ট একটি
বিন্যাসে পাশাপাশি যুক্ত হয়, যাকে মাল্টি-ভি
ড্রাইভ বলা হয় যা কিনা মাল্টি-গ্রুভড ম্যাচিং পুলিতে চলে। ভি-বেল্টগুলি সাধারণত
রাবার বা পলিমার দিয়ে তৈরি হয়, বা শক্তিশালীকরণ
এবং সাপোর্টের জন্য রাবারের ভিতরে ফাইবার (সাধারণত তুলা বা নাইলন এবং কখনও কখনও
উচ্চ স্থায়িত্বের জন্য ইস্পাত) থাকতে পারে। পরবর্তী ছবিতে একটি সাধারণ ভি-বেল্ট
এবং পুলি সিস্টেম দেখানো হয়েছে।

টাইমিং বেল্ট এবং পুলি - মেকাট্রনিক্স সিস্টেমে টাইমিং বেল্ট এবং পুলির সাহায্যে সাধারনত কোন রোটেটিং এলিমেন্টের স্পিড কম বা বেশী করা হয়। রোটেটিং স্পিড কম করার প্রয়োজন হলে রোটারি অ্যাকচুয়েটারকে (যেমন মোটর) কম ডায়ামিটারের পুলির সাথে যুক্ত করা হয় এবং রোটেটিং এলিমেন্ট বেশী ডায়ামিটারের পুলির সাথে যুক্ত থাকে। সেইরকম রোটেটিং স্পিড বেশী করার প্রয়োজন হলে ঠিক বিপরিত ব্যাবস্থা গ্রহন করা হয়। টাইমিং বেল্ট হল একটি টর্ক ট্রান্সমিটিং এলিমেন্ট। এটি সাধারনত রাবারের তৈরি একটি বেল্ট যা কিনা গীয়ারের মতই কাজ করে অথচ ‘V’ বেল্টের মত সুবিধা পাওয়া যায়। টাইমিং বেল্টের ক্ষেত্রে ‘V’ বেল্টের মত কোন স্লিপেজ থাকে না, আবার গীয়ার বক্সের মত আওয়াজ বা লুব্রিকেশান সমস্যাও থাকে না। টাইমিং বেল্টকে সবসময় একজোড়া টাইমিং পুলির সাথে ব্যাবহার করা হয় । এই টাইমিং পুলিগুলিতে কিছু সমান মাপের এবং সঠিক দূরত্বের অ্যাক্সিয়াল গ্রুভ এমন ভাবে কাটা থাকে যা কিনা টাইমিং বেল্টের মেটিং টিথের সাথে ঠিক ঠিক মিলে যায়। বেল্ট চলার সময় টাইমিং বেল্টের টিথগুলি টাইমিং পুলির গ্রুভের মধ্যে খুব সুন্দরভাবে ঢোকে এবং বেরিয়ে যায় এবং এর ফলে কোনরকম ফ্রিকশান বা নয়েজ হয় না। টাইমিং বেল্ট তৈরি করতে প্রথমে একটি স্টীলের বা গ্লাস ফাইবারের তারকে হেলিক্যালি জড়িয়ে (helically wound) একটি টাইমিং বেল্টের লোড বহনের জন্য প্রয়োজনীয় বেস তৈরি করা হয়। এরপর নিওপ্রেন বা পলিইউথ্রেন ইলাস্টোমার (neoprene or polyurethane Elastomer) ঐ বেল্টের উপর মোল্ড করে প্রয়োজনীয় টিথের আকার দেওয়া হয়। পুলি তৈরি করার জন্য সাধারনত অ্যালুমিনিয়াম অ্যালয় বা আয়রনের ব্যাবহার করা হয়। নিচে একটি সাধারন টাইমিং বেল্ট ও পুলির ছবি দেওয়া হল।

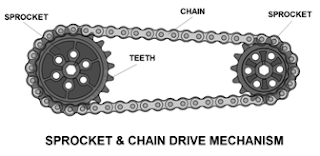
স্প্রোকেট এবং চেইন মেকানিজম আরেকটি পদ্ধতি, যা কিনা গতি ও বলকে (Motion and Force) দক্ষতার সাথে প্রেরণ করতে
ব্যবহৃত হয়। Sprockets হল দাঁতযুক্ত রোটেটিং পার্ট যা একটি রোলার চেইনের সংমিশ্রণে ব্যবহৃত হয়, এবং সাধারণত একটি অবিচ্ছিন্ন বা কন্টিনিউয়াস লুপে সংযুক্ত থাকে। স্প্রোকেটগুলি
সর্বদা একই সমতলে স্থাপন করা হয় এবং তাদের সংশ্লিষ্ট দাঁতগুলি সমান্তরাল
শ্যাফ্টের সাথে সংযুক্ত থাকে। একটি স্প্রোকেট হল ড্রাইভার এবং অন্যটি ড্রাইভেন
স্প্রোকেট। সংশ্লিষ্ট দাঁতগুলি স্প্রোকেটের পুরো পরিধির চারপাশে উপস্থিত থাকে এবং
একটি ফ্লেক্সিবল বা নমনীয় স্ট্র্যান্ড (strand) গঠনের জন্য সিরিজ দিয়ে ইনার
এবং আউটার লিঙ্ক সহ রোলার চেইন তৈরি করা হয়। স্প্রোকেট এবং চেইন সিস্টেমগুলি দীর্ঘ দূরত্বে টর্ক প্রেরণের ক্ষেত্রে একটি খুব কার্যকর উপায়। বেল্ট
ড্রাইভের তুলনায় চেইন এবং স্প্রোকেট ড্রাইভ ব্যবহার করার একটি সুবিধা হল যে চেইনটি
স্প্রোকেটের উপর পিছলে যেতে পারে না, কারণ স্প্রোকেটের দাঁত চেইনটিকে পিছলে যাওয়া থেকে বাধা দেয়, কিন্তু
অসুবিধা হল যে এটি সাধারণত আওয়াজযুক্ত (Noisy) এবং একটি বেল্ট ড্রাইভ সিস্টেমের
তুলনায় বেশি ব্যয়বহুল। পরবর্তী ছবিতে একটি সাধারণ স্প্রোকেট এবং চেইন ড্রাইভ
মেকানিজম দেখানো হয়েছে।
৮। ক্লাচ (Clutch)
ক্লাচ হল এমন একটি মেকানিজম বা প্রক্রিয়া, যা একটি ড্রাইভিং শ্যাফ্ট থেকে একটি ড্রিভেন শ্যাফটে পাওয়ার ট্রান্সমিশনকে নিযুক্ত করে এবং বিচ্ছিন্ন করে, বা অন্য কথায়, এটি দুটি ঘূর্ণায়মান দুটি শ্যাফ্টকে সংযোগ করে এবং সংযোগ বিচ্ছিন্ন করে। মেকাট্রনিক্স সিস্টেমের সাথে বিভিন্ন ধরণের ক্লাচ দেখতে পাওয়া যায় এবং তাদের টর্ক/পাওয়ার ট্রান্সমিটিং ক্ষমতা এবং ডিজাইনের উপর ভিত্তি করে তাদের কিছু সুবিধা অসুবিধা এবং তাদের নিজস্ব প্রয়োগের ক্ষেত্র রয়েছে। CNC মেশিনেও বিভিন্ন ধরনের ক্লাচের ব্যাবহার দেখা যায়। কিছু সাধারণ ক্লাচ মেকনিজমগুলি হল নিম্নরূপ।
সিঙ্গল-প্লেট ক্লাচ - সিঙ্গল-প্লেট
ক্লাচে শুধুমাত্র দুটি ফ্রিকশান ডিস্ক থাকে এবং উভয়ই একে অপরের সংস্পর্শে এলে
টর্ক ট্রান্সমিশন হয়। একটি ইনপুট শ্যাফ্টের সাথে কানেক্ট থাকে এবং অন্যটি প্রেশার
প্লেটের সাথে সংযুক্ত থাকে এবং একটি স্প্লাইনড (splined) শ্যাফ্টের ওপর দিয়ে স্লাইড বা পিছলে যেতে পারে। প্রেসার প্লেটটি একটি
প্রি-কম্প্রেসড (pre-compressed) স্প্রিং এর সাথে সংযুক্ত থাকে, অন্য ডিস্কে অ্যাক্সিয়াল ফোর্স বা অক্ষীয় বল প্রয়োগ করে থাকে।
মাল্টি-প্লেট ক্লাচ - এটি একাধিক প্লেট বা ফ্রিকশান
ডিস্ক নিয়ে গঠিত এবং সিঙ্গল-প্লেট ক্লাচ সিস্টেমের মতই কাজ করে। এক্ষেত্রে একাধিক
ডিস্ক একে অপরের সংস্পর্শে থাকার জন্য আরও বেশি কন্টাক্ট এরিয়া থাকে, তাই এটি আরও বেশি টর্ক ট্রান্সমিটিং করার ক্ষমতা দেয় এবং প্লেটগুলি সহ সমগ্র
ক্লাচ ইউনিট সাধারণত তেলের মধ্যে নিমজ্জিত থাকে।
কোণ ক্লাচ - এটি দুটি মেল এবং ফিমেল (Male & Female) ড্রাম নিয়ে গঠিত। মেল ড্রামটি একটি মোটর শ্যাফ্টের সাথে সংযুক্ত থাকে এবং এতে
একটি অভ্যন্তরীণ ফ্রিকশান লাইনিং বা আস্তরণ থাকে, এবং ফিমেল ড্রামটি একটি স্প্লাইনড (splined) শ্যাফ্টের সাথে ফিক্সড থাকে এবং একটি এক্সটার্নাল ফ্রিকশান লাইনিং বা বাইরের
দিকে একটি ঘর্ষণ আস্তরণ থাকে। যখন ক্লাচ এনগেইজড বা নিযুক্ত থাকে, তখন ফিমেল কোণটি মেল কোণের ভিতরে প্রবেশ করে এবং একসাথে ঘুরতে শুরু করে।
সেন্ট্রিফিউগাল ক্লাচ - এটি স্বয়ংক্রিয়ভাবে নিযুক্ত
হওয়ার কারণে এটিকে একটি স্বয়ংক্রিয় ক্লাচও বলা হয়ে থাকে। এখানে সেন্টারে একটি
হাব রয়েছে, যা প্রাইম মুভারের সাথে সংযোগ করা হয়েছে, এবং একাধিক শু (shoes) স্প্রিংসের মাধ্যমে এই হাবের
সাথে সংযুক্ত রয়েছে এবং প্রতিটি শু ফ্রিকশান মেটেরিয়াল দিয়ে কভার করা থাকে। এই
ক্লাচের কর্মপদ্ধতি একটি সেন্ট্রিফিউগাল ফোর্স (centrifugal
force) দ্বারা সম্পন্ন হয়।
হাইড্রোলিক ক্লাচ - এগুলি সাধারণত স্বয়ংক্রিয়
ট্রান্সমিশন যুক্ত গাড়িগুলিতে ব্যবহৃত হয়। এই ক্লাচ দুটি ভিন্ন অংশ নিয়ে গঠিত, একটি পাম্প এবং অপরটি টারবাইন এবং উভয়েরই কোনাকুনিভাবে লাগানো কিছু ব্লেড
রয়েছে। এখানে পাম্পটি ড্রাইভার শ্যাফ্টের সাথে সংযুক্ত থাকে এবং টারবাইনটি আউটপুট
শ্যাফ্টের সাথে সংযুক্ত হয়। পাম্পটি ঘূর্ণন শুরু করার সাথে সাথেই সেন্টার থেকে তেল
বাইরের দিকে প্রবাহিত হতে শুরু করে, এবং একটি
সেন্ট্রিফিউগাল ফোর্সের (centrifugal force) কারণে এবং ব্লেডগুলি সেন্ট্রিফিউগাল এনার্জিকে শোষণ (absorb) করে টারবাইনের ব্লেডের দিকে নিয়ে যায়। ক্লাচের ব্লেডগুলিকে এমনভাবে ডিজাইন
করা হয়েছে যাতে কিনা তরল প্রবাহ উভয় অংশকেই গতিশীল করে।
ইলেক্ট্রোম্যাগনেটিক ক্লাচ - ইলেক্ট্রোম্যাগনেটিক ক্লাচ ইলেক্ট্রিক্যালি বা বৈদ্যুতিকভাবে কাজ করে এবং মেকানিক্যালি বা যান্ত্রিকভাবে টর্ক প্রেরণ করে। এটির ড্রিভেন শ্যাফটে একটি আর্মেচার এবং ড্রাইভার শ্যাফ্টের সাথে একটি ইলেক্ট্রোম্যাগনেট রয়েছে। ইলেক্ট্রোম্যাগনেটে কারেন্ট সরবরাহ করা হলে, এটি একটি চৌম্বক ক্ষেত্র তৈরি করে যা আর্মেচারকে আকর্ষণ করে এবং উভয় ফ্রিকশান প্লেটের মধ্যে একটি ফ্রিকশান বা ঘর্ষণ শক্তি উৎপন্ন করে। ক্লাচ disengage বা বিচ্ছিন্ন করার জন্য, বৈদ্যুতিক সরবরাহ বন্ধ করা হয় এবং একটি স্প্রিং টেনশন আর্মেচারের অবস্থানকে পুর্বের অবস্থানে ফিরিয়ে নেয়।নিচের ছবিতে একটি ইলেক্ট্রোম্যাগনেটিক ক্লাচের ছবি দেখানো হল।

৯। কাপলিং
যে কোন মেকাট্রনিক্স সিস্টেমে দুটি শ্যাফটের মধ্যে
একটি দৃঢ় সংযোগ হিসাবে কাপলিং কাজ করে থাকে এবং এটিও একটি টর্ক ট্রান্সমিটিং এলিমেন্ট। কাপলিং সাধারনত দুই
প্রকারের হয়, এগুলি হল রিজিড কাপলিং এবং ফ্লেক্সিবল কাপলিং। রিজিড কাপলিং সাধারনত যেখানে
দুটি শ্যাফটের মধ্যে কোনরূপ মিস-অ্যালাইনমেন্ট থাকে না, সেক্ষেত্রে ব্যাবহার করা হয়। কিন্তু যেক্ষেত্রে
দুটি শ্যাফটের মধ্যে সামান্য মিস-অ্যালাইনমেন্ট থাকে, সেক্ষেত্রে ফ্লেক্সিবল কাপলিং ব্যাবহৃত হয়ে থাকে। যেমন উদাহরণস্বরূপ CNC মেশিনের অ্যাক্সিস সার্ভো মোটর এবং বলস্ক্রুর মধ্যে সংযোগকারী হিসাবে ফ্লেক্সিবল কাপলিংই ব্যাবহার করা হয়। এছাড়া অন্যান্য মোটর ও পাম্পের সংযোগের ক্ষেত্রে যেমন
হাইড্রোলিক, কুল্যান্ট ইত্যাদির
ক্ষেত্রে রিজিড কাপলিং ব্যাবহার করা হয়। নিচে দুই ধরনের কাপলিং এর ছবি দেওয়া হল।

মেকাট্রনিক্স সিস্টেমে বিভিন্ন ধরনের ফ্লেক্সিবল কাপলিং ব্যাবহার করা হয়। পরবর্তী ছবিতে বামদিকে একটি ফ্লেক্সিবল কাপলিং সার্ভো মোটর এবং বল-স্ক্রুর মধ্যে কিভাবে সংযোগ করা
থাকে তা দেখানো হয়েছে এবং ডানদিকের ছবিতে ফ্লেক্সিবল কাপলিংএর সাহায্যে কতরকম মিস-অ্যালাইনমেন্ট ঠিক করা যেতে পারে তা
বোঝানো হয়েছে।

১০। টেপার লক বুশেস
মেকাট্রনিক্স সিস্টেমে কখনো কখনো বিভিন্ন ধরনের টেপার লক বুশ ব্যাবহার করা হয় গীয়ারের শ্যাফট এবং হাব অথবা টাইমিং পুলি
ইত্যাদিকে সংযোগ করার জন্য। এই ব্যাবস্থায় একটি ‘বুশ’ ব্যাবহার করা হয়
যার বাইরের দিকটা ‘টেপার’ করা থাকে এবং একটি দিক চেরা থাকে। এটি একটি ‘টেপার লক হাবের’ মধ্যে ঢুকতে পারে
যার ভিতরের দিকটা একই অ্যাঙ্গেলে ‘টেপার বোর’ করা থাকে। যখন এই দুটি এলিমেন্টকে কোন শ্যাফটের ওপর রেখে, স্ক্রুএর সাহায্যে টাইট করা হয়, তখন টেপার লক
বুশটির যে অংশটি চেরা রয়েছে সেটি ধীরে ধীরে বন্ধ হতে থাকে এবং টেপার লক বুশের
ভেতরে থাকা শ্যাফটটিকে বুশটি খুব দৃড়ভাবে আটকে ধরতে থাকে। এই ব্যাবস্থায় শ্যাফট থেকে হাবে বা হাব থেকে শ্যাফটে কোন ব্যাকল্যাশ ছাড়াই
টর্ক ট্রান্সমিট হয়ে থাকে। পরবর্তীতে একটি টেপার লক বুশের ছবি দেওয়া হল।

১১। ওয়ার্ম এবং ওয়ার্ম হুইল
সাধারনত রোটারি মোশানকে এক প্লেন থেকে অপর প্লেনে
ট্রান্সমিট করার জন্য স্ক্রু বা ওয়ার্ম এবং গীয়ার বা ওয়ার্ম হুইলের ব্যাবহার হয়ে
থাকে। যখন স্ক্রু বা
ওয়ার্মকে মোটরের সাহায্যে ঘোরানো হয়, তখন ঐ ওয়ার্মের
সাথে সংযুক্ত গীয়ার বা ওয়ার্ম হুইলও ঘুরতে থাকে। অর্থাৎ এই পদ্ধতিতে রোটারি মোশানকে এক প্লেন থেকে অপর প্লেনে ট্রান্সমিট করা
হয়।উদাহরণস্বরূপ CNC মেশিনের রোটারি অ্যাক্সিসের মুভমেন্টের জন্য সাধারনত ওয়ার্ম
এবং ওয়ার্ম হুইলের ব্যাবহার হয়।এখানে ওয়ার্ম এবং
ওয়ার্ম হুইলের ‘টিথ’ এমনভাবে বাঁকানো বা কার্ভ করা থাকে, যাতে কিনা ওই
ওয়ার্ম এবং ওয়ার্ম হুইলের টিথের মধ্যেকার সংযোগ বৃদ্ধি পায়। এই ব্যাবস্থাটিকে এনভেলোপিং বা গ্লোবয়েড (Globoid) বলা হয়। এই ব্যাবস্থায়
ওয়ার্ম এবং ওয়ার্ম হুইলের মধ্যে বেশী পরিমান টিথের সংযোগ থাকার ফলে এই ব্যাবস্থায়
টর্ক বেশী পরিমান টিথের মধ্যে ছড়িয়ে পড়ে, ফলে ওয়ার্ম এবং
ওয়ার্ম হুইল বেশী পরিমান লোড নিয়ে ঘুরতে সক্ষম হয়। নিচে একটি সাধারন ওয়ার্ম এবং ওয়ার্ম হুইল ব্যাবস্থার ছবি দেওয়া হল।

১২। ক্যাম ড্রাইভ মেকানিজম
ইন্ডেক্সিং মেকানিজমের সাহায্যে সাধারনত কোন মোশানকে
একটি পূর্বনির্ধারিত পাথ বরাবর ট্রান্সমিট করা হয়। আবার কিছু ক্ষেত্রে এই মেকানিজমের সাহায্যে কোন রোটারি বা অসিলেটিং মুভমেন্টকে
বিভিন্ন স্টেপ মুভমেন্টে পরিবর্তন করা যায়। ক্যাম ড্রাইভ মেকানিজম হল একটি নির্ভরযোগ্য এবং অ্যাকুইরেট ইন্ডেক্সিং
মেকানিজম, যা কিনা বিভিন্ন ধরনের মেকাট্রিনক্স সিস্টেমে প্রায়ই
দেখা যায়। যেমন উদাহরণস্বরূপ এটির ব্যাবহার CNC মেশিনের অটোমেটিক টুল চেঞ্জিং সিস্টেমে দেখা যায়। ক্যাম ড্রাইভ মেকানিজমের দুটি আলাদা অংশ রয়েছে, এদুটি হল ক্যাম এবং ফলোয়ার। ক্যামে সাধারনত
ইনপুট হিসাবে রোটারি মোশান দেওয়া হয় (ইন্ডাকশান বা হাইড্রোলিক মোটরের সাহায্যে)
এবং ফলোয়ারের আউটপুটে অসিলেটিং মুভমেন্ট পাওয়া যায়। ক্যাম ড্রাইভ মেকানিজমের সাহায্যে মেকাট্রিনক্স সিস্টেমের বিভিন্ন জটিল
মুভমেন্ট সহজেই পাওয়া যায়। বিভিন্ন প্রকারের
ক্যাম ড্রাইভ মেকানিজম হয়ে থাকে, নিচে CNC মেশিনের অটোমেটিক
টুল চেঞ্জিং সিস্টেমে ব্যাবহৃত একটি ক্যাম ড্রাইভ মেকানিজমের ছবি দেওয়া হল।

১৩। র্যাচেট অ্যান্ড পল
মেকানিজম
র্যাচেট হল এমন একটি ইন্ডেক্সিং মেকানিজম যা কিনা
লিনিয়ার বা রোটারি মুভমেন্টকে সবসময় একই দিকে চালনা করতে ব্যাবহৃত হয়। এই ব্যাবস্থায় র্যাচেটের মধ্যে একটি গীয়ার হুইল থাকে
এবং তার সাথেই দুটি ড্রাইভিং পল এবং লকিং পল স্প্রিং টেনশানে লাগানো থাকে (ছবিতে
দ্রষ্টব্য)। লকিং পল গীয়ারের
টিথের সাথে এমন অ্যাঙ্গেলে লাগানো থাকে যাতে কিনা সেটি কেবলমাত্র একই দিকে গিয়ারের
টিথের উপর দিয়ে সহজেই মুভ করতে পারে এবং গীয়ার বিপরিত দিকে মুভ করতে চাইলে ওই লকিং
পল স্প্রিং টেনশানে ঠিক পরবর্তী গীয়ারের টিথের সাথে আটকে যায় এবং গীয়ারকে বিপরিত দিকের মুভমেন্ট হতে বাধা দেয়। ড্রাইভিং পলের সাথে একটি আর্ম লাগানো থাকে, যার সাহায্যে
গীয়ারকে ঘোরানো হয়। নিচে একটি সরল র্যাচেট
অ্যান্ড পল মেকানিজমের ছবি দেওয়া হল।

১৪। জেনিভা মেকানিজম
জেনিভা মেকানিজমের সাহায্যে সাধারনত কন্টিনিউয়াস
রোটারি মুভমেন্টের থেকে অসম বা ইন্টারমিটেন্ট (Intermittent) রোটারি মুভমেন্ট পাওয়া যায় এবং এটিও একটি ইন্ডেক্সিং
মেকানিজম। এই ব্যাবস্থায়
সাধারনত দুটি হুইল থাকে, একটি ড্রাইভিং হুইল
ও অপরটি জেনিভা হুইল। ড্রাইভিং হুইলের
মধ্যে একটি পিন এমনভাবে বসানো থাকে, যাতে ড্রাইভিং হুইল
ঘোরার সময় ওই পিনটি জেনিভা হুইলের এক একটি স্লটের মধ্যে দিয়ে চলাচল করতে পারে। নিচে একটি সরল জেনিভা মেকানিজমের ছবি দেওয়া হল। এই ব্যাবস্থায়
ড্রাইভিং হুইলের কন্টিনিউয়াস রোটারি মুভমেন্টের ফলে জেনিভা হুইলের এক একবারে 90° (নব্বই ডিগ্রী)
মুভমেন্ট হবে। বিভিন্ন
মেকাট্রনিক্স সিস্টেমে জেনিভা মেকানিজমের ব্যাবহার প্রায়ই দেখা যায়।



কোন মন্তব্য নেই:
একটি মন্তব্য পোস্ট করুন